
销售热线
主营:欧姆龙,三菱,安川,Pro-face
・ Q系列/L系列定位模块
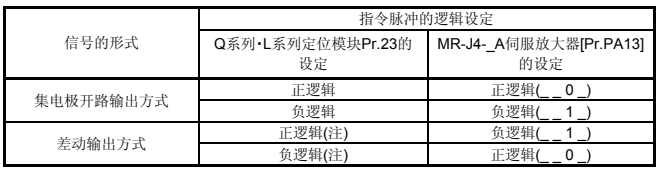
注 使用Q系列以及L系列定位模块时,该逻辑是指N侧的波形。因此,请与伺服放大器的输入脉冲逻辑相反。
・ F系列定位模块

(1) 脉冲串输入
(a) 脉冲输入的波形选择
指令脉冲能够以3种形式输入,并能够选择正逻辑或者负逻辑。指令脉冲串的形式请通过[Pr.PA13]设定。详情请参考5.2.1项。
(b)连接和波形
1)集电极开路输入方式请按下图连接。
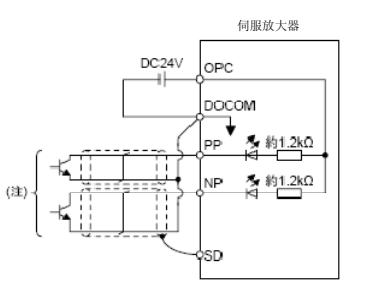
注. 脉冲串输入接口使用光耦。
因此,脉冲串信号线串接电阻时,会因电流降低出现不正常动作。
当将[Pr.PA13]设定为"0 0 1 0"后,把输入波形设定为负逻辑、正转脉冲串以及反转脉冲串的情况进行说明如下。

2)差动输入方式请按下图连接。
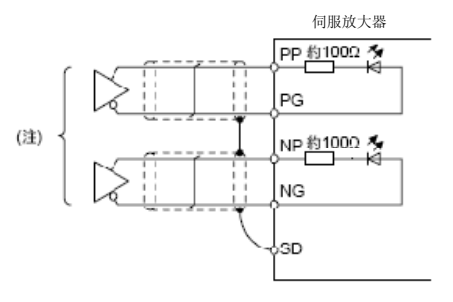
注:脉冲串输入接口使用光耦。
因此,脉冲串信号线串接电阻时,会因电流降低出现不正常动作。
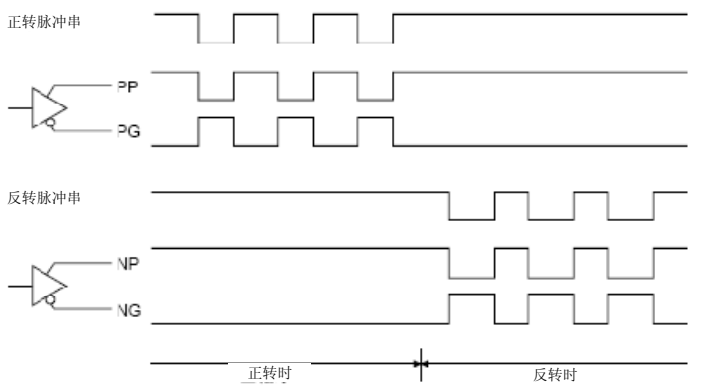
当将[Pr.PA13]设定为"0 0 1 0"后,把输入波形设定为负逻辑,正转脉冲串以及反转脉冲串的情况进行说明如下。PP,PG,NP以及NG的波形是以LG为基准的波形。
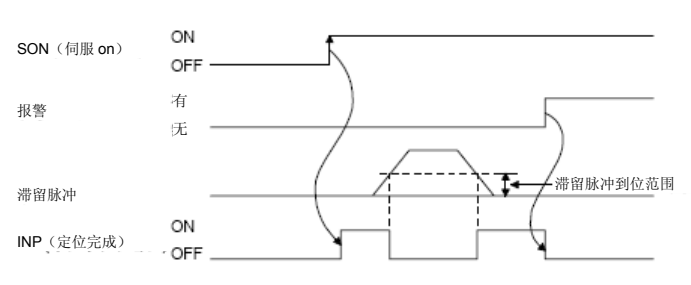
(3) INP(定位完毕)
偏差计数器的滞留脉冲在设定的到位范围([Pr.PA10])以下时,INP为ON。将到位范围设定为较大数值,低速运行时,可能会一直处于ON状态。
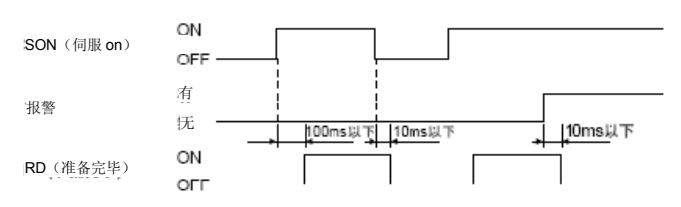
(3) RD(准备完毕)
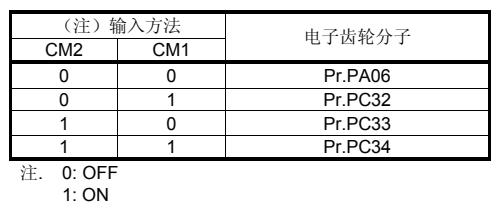
(4) 电子齿轮的切换
通过CM1和CM2的组合,可以选择通过参数设定的4种不同的电子齿轮分子。
使CM1和CM2为ON或者OFF的同时切换电子齿轮的分子。因此,切换过程中发生撞击时,请使用位置平滑([Pr.PB03])进行缓和。
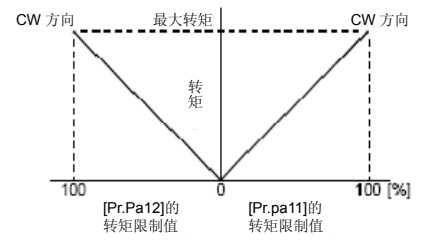
(5)转矩限制

(a) 转矩限制和转矩
设定[Pr.PA11 正转转矩限制]以及[Pr.PA12 反转转矩限制]时,运行中一直限制最大输出转矩。限制值与伺服电机的转矩关系如下所示。
TLA(模拟量转矩限制)的输入电源和伺服电机的转矩限制值的关系如下所示。相对一定电压的转矩限制值根据产品不用约有5%的偏差。另外,电压在0.05V以下时,无法充分限制输出转矩,转矩可能产生变动,所以请在0.05V以上的电压下使用。
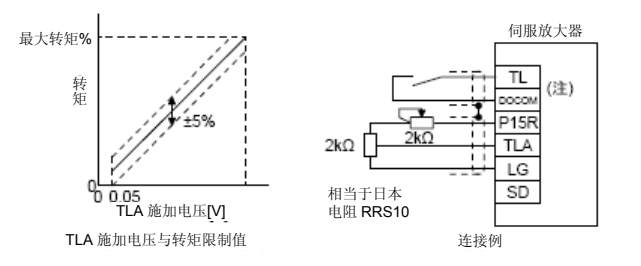
注. 漏型输入输出接口的情况。源型输入输出接口的情况, 请参考3.9.3项。
(b) 转矩限制值的选择
使用TL(外部转矩限制选择),通过[Pr.PA11 正转转矩限制]或[Pr.PA12 反转转矩限制]和TLA(模拟量转矩限制)进行转矩限制。如下所示。
另外,设定[Pr.PD03]~[Pr.PD22]使TL1(内部转矩限制选择)有效时,能够选择[Pr.PC35 内部转矩限制2]。
但是,如果相比于TL以及TL1选择的限制值,[Pr.PA11]或者[Pr.PA12]中的设置值较小时,[Pr.PA11]或者[Pr.PA12]的値有效。
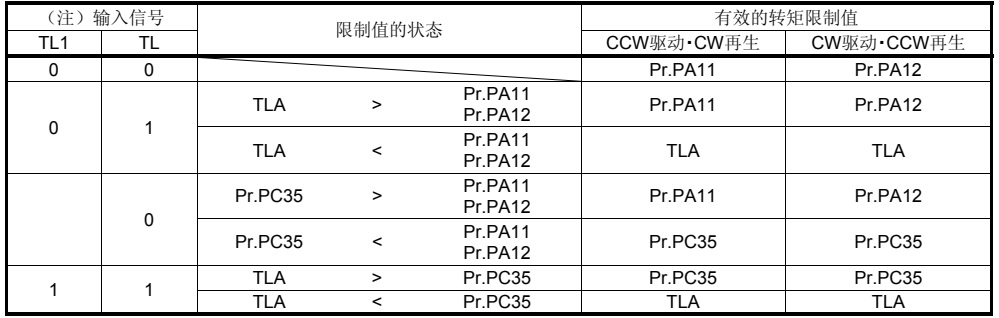
注. 0: OFF
1: ON
(c) TLC(转矩限制中)
伺服电机的转矩达到正转转矩限制、反转转矩限制或者模拟量转矩限制所设置的转矩时,TLC变为ON。
