销售热线
主营:欧姆龙,三菱,安川,Pro-face
对于实时、决策或者低延时应用,Linux能够提供多种方案。第一种方法是和 Linux 内核一起运行一个 hypervisor或者co-kernel。这种方案中hypervisor或者co-kernel的优先级高于 Linux,实时任务则运行于其中。另外一种方式是使用非对称异构多核系统,Linux和另外一个实时内核分别运行在不同处理器内核上。最后,还可使 Linux 更具抢占性从而提高其实时性能。这通常可以通过 PREEMPT_RT 补丁实现。
实时系统的实时能力,并不表示其能够达到很高的处理速度。实时能力是指系统能够在规定的时间内完成响应,这个时间可以是微秒、毫秒甚至是秒级。越小的时间范围对于系统的软件和硬件要求也会更高。本文我们使用 Toradex 计算机模块上通过三种不同的方法实嵌入式实时Linux方案。
以 200us 为单位,翻转一个 GPIO,并测试信号在翻转时候的抖动。下面是具体测试情况:
1). 普通Linux
Linux:3.14.52,CONFIG_PREEMPT_VOLUNTARY=y
92%的翻转抖动在40us以内,最糟糕的情况是超过15ms的延时。普通的 Linux很难保证每次任务都在规定的时间内完成,即使我们把响应时间上线放宽到10ms。
2). Real-timeLinux – PREEMPT_RT
Linux:3.14.52,PREEMPT_RT_FULL<p CxSpLast" style="margin-left:18.0pt">PREEMPT_RT
在使用 PREEMPT_RT 补丁后,几乎所有的任务都在 40us.相比于普通 Linux,抖动分布更加集中在10 us以内,并且最大的延时为106us。
3). Real-timeLinux – Xenomai
模块:Colibri iMX6
Linux:3.14.52,Xenomai
Xenomai 通过 co-kernel 的方式提供高于 Linux内核优先级运行任务。同 PREEMPT_RT有相近的实时性能表现,但最大的延时为17.5us。
4). iMX7 – HMP异构多核处理
模块:ColibriiMX7
Linux:4.1.15 onCortex-A7
FreeRTOS: v8.0.0 onCortex-M4
Colibri iMX7 在同一个处理器上集成了 Cortex-A7和 Cortex-M4 内核,Cortex-A7 上可以运行 Linux 等复杂、多任务操作系统,而 Cortex-M4 则能运行 FreeRTOS 等实时操作系统,甚至是直接运行应用程序。由于实时任务和Linux 分别运行在独立的处理器内核上,所以两者之间不会产生 CPU 资源竞争,保证 M4 内核上任务的独占性。从上面测试的结果可以看到,信号翻转几乎都在 200us 的时间点上完成,最大的抖动是0.5us。
从上面的测试中可以看到,普通的Linux内核很难保证任务的实时性,即在规定时间内完成响应。通过内核补丁,或者像Xenomai一样,引入高优先级的co-kernel,都可以很大程度上改善Linux的实时性。用户可以在不改变硬件平台的情况下实现实时应用。基于软件方式实现的实时Linux,意味着部分Linux内核API发生了变化。为了保证整个任务的实时性,用户可能需要修改部分外设驱动代码,例如CAN驱动。因为默认的外设驱动并不是针对实时Linux内核。Colibri iMX7通过硬件的方式,通过不同的处理器内核分离非实时和实时任务。

作为20世纪最负盛名的四大发明之一,激光技术在现代信息社会光电子技术领域的发展受到了世界先进国家的高度重视,每年与激光相关产品和服务的市场价值高达上万亿美元。激光技术为什么发展如此迅速?华北工控认
一、工程要求用一台维控430T的COM口RS-422接三菱PLC,RS-485接欧姆龙的变频器。二、解决方案由于RS-422与RS-485的引脚有共用,4.3寸屏不能同时使用485和422.所以采用
TNGO, a machine builder that has supplied luminance inspection machines to major Korean LED produc

在智慧医院建设日益完善的今天,手术室作为医院的重要组成也开始与物联网、互联网、图像处理技术等有机结合,数字化手术室建设成为趋势。数字化手术室中的远程医疗数字化手术室是以设备基础为基础、以信息整合为
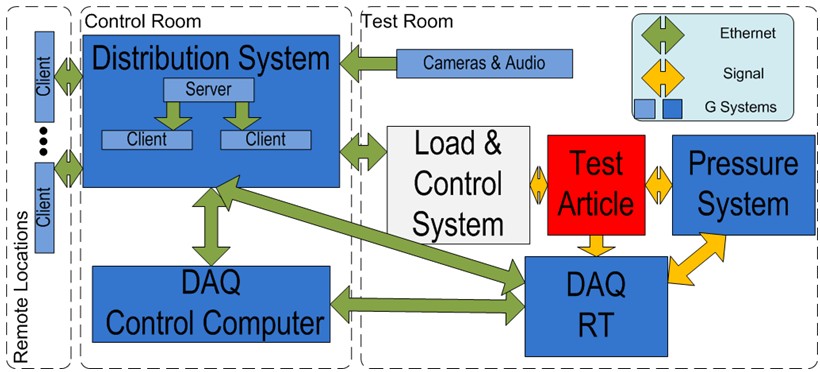
简介2010年8月,我们首次成功地在猎户座GTA上进行了结构测试。此项1.05大气压下的耐压测试需要以下三个分布式系统共同运作完成:增压和排气(PV)系统,用于自动控制载人舱内压力 数据采集系统(D
本期上海研强小编给大家分享的是嵌入式工控机助力机器视觉在工业中创新发展,希望看完本篇文章您能对嵌入式工控机有一个全新的认识!如今,人工智能在我国发展迅猛, 随着新一代信息科技的成熟落地被越来越多的引
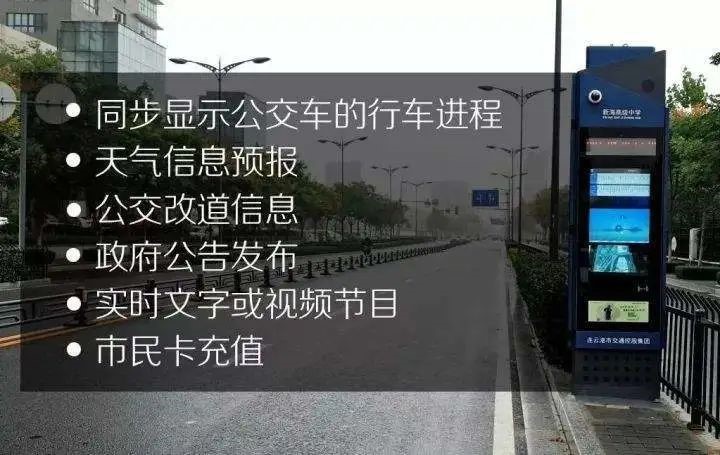
随着时代的进步,公共交通设施也随之改善。当今的智能电子公交站牌融合大数据、物联网和计算机等新技术,集图文信息播放、语音报站和视频监控等功能于一体,是智慧城市公共交通系统的重要组成部分。 据华

应用背景 21世纪的交通将是智能化的交通。智能交通系统能快速准确的进行交通信息的采集、处理、决策和指挥调度,使交通基础设施发挥出最大的效能,从而产生巨大的社会经济效益。随着我国4万亿经济刺激方