销售热线
主营:欧姆龙,三菱,安川,Pro-face
Genesis Systems Group 是美国一家机器人焊接和自动化解决方案开发商,总部位于美国爱荷华州达文波特市,他们开发的无损检测(NDI)机器人系统适用于检测大小型飞机、卫星甚至全尺寸火箭使用的大型零部件。基于 PC 和 EtherCAT 的控制技术不仅能够为实现高精度及高吞吐量的全自动安全关键零部件检测保驾护航,而且还可以节省大量布线和安装成本。
很少有行业会像航空航天工业那样对材料测试和质保有如此高的要求。使用经过全面检验的材料和零部件来确保乘客、机组人员及货物的安全绝非易事。Genesis Systems Group 是一家机器人系统集成商,主要为航空航天运输及工业加工市场提供支持。公司专注于无损检测机器人系统的研发,满足飞机、卫星和火箭等使用的大型零部件的特殊检测要求。即使对于经验丰富的专业人员来说,用人工检测这些零部件也一直是一项巨大的挑战,因为他们必须在大型零部件周围走动,同时确保所有材料检测过程都符合最高的精度要求。Genesis的检测系统采用倍福基于 PC 和 EtherCAT 的控制技术实现检测过程自动化,现在能够以更快的速度及所需的精度执行这些任务。

机器人系统专为终极试验而设计
Genesis Systems 的无损检测解决方案中的 Nspect™ 系列旨在检验零件表面较大的航空航天零部件是否存在材料缺陷,以及是否符合制造规范。为此,Genesis 将机器人与超声波加工设备集成在一起,通过发射探头和接收探头利用超声波透射法进行检测。常见的超声波无损检测类型包括脉冲回波式超声成像、超声相控阵成像和错位散斑干涉检测,同时它也支持其它检测技术。可以检测的材料范围很广,但最常见的是钢、铝和复合材料。
这些系统中的一个重要组成部分是一个六轴关节型机器人及与之成对出现的被称为 Genesis Blitz Module™ 的虚拟编码器。通过 C ++ 编程,Blitz Module™ 可以捕获所有机器人位置,并在约 200 微秒的时间内创建一个六自由度虚拟编码器。这适用于以 1 毫米或更小的增量测量得到的栅格尺寸。位置反馈确保可以无缝检测表面面积较大的零部件。Genesis Systems Group 自动化系统工程师 Ryan Steckel 解释道:“在检测领域,这被称为脉冲接通位置(PoP)。Blitz Module™ 从正在被测试的材料中获取检测数据,并将数据与仪器或传感器位置关联起来。发送脉冲的速度越快,机器人运行的速度就越快,无损检测系统的生产效率就越高。”发送这些脉冲的官方认可标准时间是 10 毫秒,而 Genesis 开发的 Blitz Module™ 可以在 1 毫秒时间内发送脉冲。在这种情况下,EtherCAT 还可以实现极为精确的测量和高精度的系统同步,这对于测试和测量应用来说至关重要。

Genesis 公司着手的一项被称为 RoboPogo 的新开发项目,它是一个由多个关节型机器人构成的零部件固定系统,用于固定正在进行 Nspect™ 无损检测测试的零部件
基于 PC 的控制技术简化系统集成
Moon 说道:“我们使用 RoboPogo 等解决方案实现的应用都非常复杂,因此我们需要使用自动化系统来简化我们的设计。基于 PC 的控制系统就是个理想选择,因为我们可以通过一站式提供的同一个集成式平台完成所有任务。”Genesis Systems 将所有功能集成到一台倍福的 CX2030 嵌入式控制器中。这台功能强大的设备可以运行 PLC、安全 PLC、运动控制、HMI 软件、Windows 操作系统以及 Genesis 使用的任何检测软件。Steckel 解释道:“我们在由 20 个机器人构成的系统上使用通过 EtherCAT 联网的 CX2030 嵌入式控制器进行控制,所有这些任务只使用了约 25% 的 CPU 容量,采集所有无损检测数据并在 1 毫秒时间内保持与 20 个不同 KUKA 机器人的通信真的很了不起,这也很好地证明了基于 PC 的控制和 EtherCAT 的价值。”
使用 TwinCAT 3 软件实现系统编程和运行时进一步简化了系统部署。Whitney Moon 说道:“开发环境包括结构化文本和面向对象的编程(OOP),这让我们可以根据需要轻松调整 RoboPogo 解决方案 — 因为有些系统可能只有 4 个机器人,而有些系统可能有 20 多个机器人。”OOP 让 Genesis 能够在新系统中轻松实现现有的代码库,Steckel 补充说道:“开始运行一个新系统时,如果只需要设置基本参数,而不是重写每行代码,那肯定要容易得多。”

使用倍福的 TwinCAT 3 软件实现系统编程和运行时
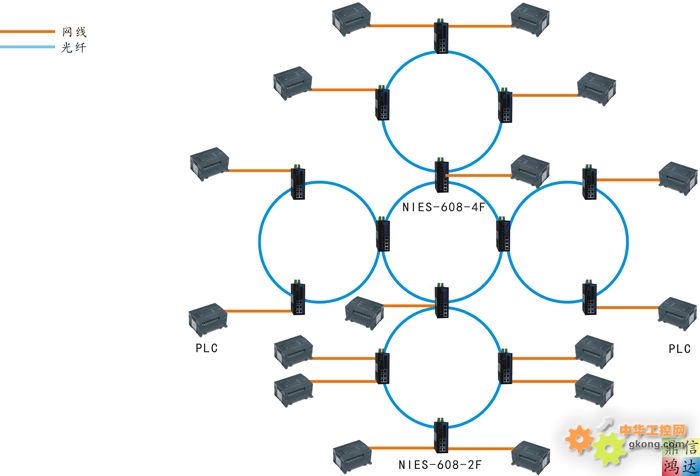
随着以太网技术的不断发展以及普及,使得现在的可编程逻辑控制器(Programmable Logic Controller简称PLC)大都开始具备以太网接口用于通信用途,但是PLC基本上都是用于工业现

一、概述近年来,许多工业设备制造公司随着业务扩张,业务遍及全国各地,甚至全球,而生产出来的设备必然存在出现问题的时候,一旦设备出现问题,厂商派出维护工程师前往现场进行检查和维修,然而在这个过程中,有
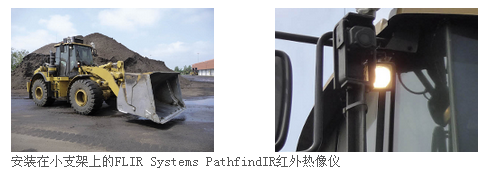
FLIR Systems的PathFindIR红外热像仪被广泛用于增强驾驶员视觉。然而,PathFindIR不仅能在黑夜中产生清晰的图像,也可以穿透烟雾。热像仪能够明确区分冷热区。正是以下这些特性使
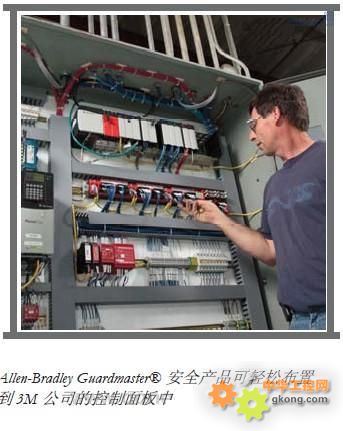
解决方案安全控制系统智能电机控制* 开放式架构的 Allen-BradleyPowerFlex 700S 交流变频器可增强与控制系统的集成度,进而提高可视性和通信能力取得的成果* 在最短的停机时间内
2011-03-29 作者:上海卓岚信息科技有限公司 来源:zlmcu 在ZLSN2000之后,上海卓岚科技依托其自身的嵌入式Web服务器技术ZLWeb,推出了专门针对嵌入式网页控制的模块ZLSN
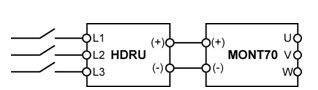
摘要:MONT70和HDRU构成的四象限电梯一体化控制系统,实现四象限运行,减少能耗,能量回馈单元作为电梯一体化控制系统的一部分,实现数据交换,提高了一体化产品的集成度,增强了电梯一体化控制器产品的
汽车电子控制器ECU生产线测试组装段整体解决方案: 汽车电子控制器ECU入厂检测;汽车电子控制ECU生产自动上料;ECU飞思卡尔、英飞凌、TI等芯片的软件注入(BT);汽车控制器(ECU、HCU、电
仪器总线性能——理解仪器控制中的竞争的总线技术概览 欢迎使用《设计下一代测试系统的开发者指南》。该指南收集了许多与测试系统设计相关的白皮书,可以帮助您在开发测试系统时降低成本、提高测试吞吐量并扩展对